
ماژول DRV8825 یک برد کوچک بر پایه DRV8825 می باشد که از آن برای راه اندازی استپر موتور ها استفاده می شود . این ماژول همانند ماژول های A4988 امکان نصب بر روی برد و شیلد های CNC را دارند . از این ماژول برای درایو استپر موتور های دو قطبی استفاده می شود . DRV8825 امکان درایو یک موتور 48 ولتی با جریان هر قطب تا حداکثر 2.2 آمپر را دارد . همچنین می توان گام های موتور را در حالت های استپ کامل تا 1/32 استپ تنظیم نمود که این ویژگی آن یک نوع مزیت در برابر سایر ماژول های درایور استپر به حساب می آید . در این آموزش قصد داریم به نحوه راه اندازی و به کار گیری این شیلد برپدازیم . چینش پایه های این ماژول تقریبا شبیه به ماژول A4988 است ، اما در بالاترین بازدهی خود میتواند جایگزین A4988 باشد . از جمله مزایای این ماژول داشتن محافظ اتصال کوتاه ، محافظ دمای بحرانی و نیز تنظیم محدوده جریان می باشد . ولتاژ کنترل این ماژول 3.3 ولت تا 5 ولت است که امکان اتصال مستقیم به انواع آردوینو ها را دارد .
نکته مهم در اربطه با ماژول های درایور موتور ها اختلاف مقدار نامی با مقادیر عملی می باشد . به طور کلی در طراحی های خود باید بر روی 70 درصد توان نامی ماژول ها حساب کرد .
مشخصات :
- ولتاژ کاری ماژول 3 تا 5 ولت
- ولتاژ راه اندازی موتور از 8.2 تا 42 ولت
- دارای مدار محافظ دمای بحرانی و اتصال کوتاه با قابلیت Shutdown
- دارای پتانسیومتر جهت محدود کردن حداکثر جریان
- دارای رگولاتور داخلی جهت تغذیه
- دارای 6 ضریب استپ 2 و 4 و 8 و 16 و 32 و 1
- حداکثر جریان در صورت داشتن خنک کننده 2.4 آمپر
- حداکثر جریان در حالت معمول 1.5 آمپر
- هماهنگ با برد ها و شیلد های CNC
پین های ماژول DRV8825 :
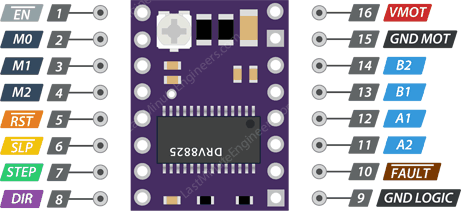
پین های این ماژول تفاوت چندانی با سایر درایور های دیگر ندارند . پین های ماژول به صورت زیر است :
- VMOT پایه تغذیه مثبت موتور.
- GND زمین موتور.
- پین های A1 ، A2 ، B1 و B2 پین های خروجی های ماژول می باشد کبه به کویل های موتور متصل می شود .
- FAULT پین تشخیص خطا می باشد .
- GND LOGIC به زمین MCU متصل می شود .
- EN پین فعال سازی می باشد .
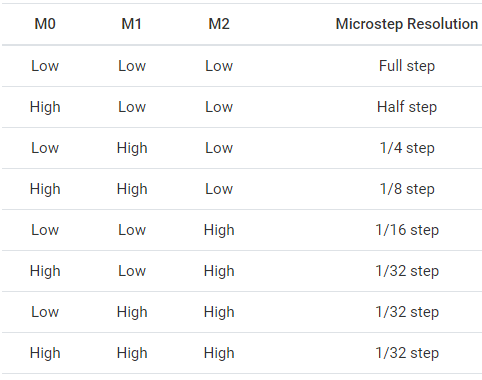
- پین های M0 ، M1 و M2 جهت تعیین اندازه هر استپ می باشند که می توانید از جدول زیر برای تعیین گام استفاده کنید :
- پین RST برای ریست کردن ماژول می باشد .
- پین SLP برای حالت خواب ماژول است که با صفر کردن این پین ماژول غیر فعال شده و مصر آن به حداقل ممکن می رسد .
- پین STEP جهت کنترل استپر می باشد . این پین به MCU متصل می شود که با هر لبه بالارونده بر روی این پین ، موتور به اندازه یک استپ (بسته به مقدار تنظیم شده ) خواهد چرخید .
- DIR این پین نیز جهت تعیین جهت چرخش ماژول می باشد که اگر یک باشد موتور در جهت ساعتگرد و در صورتی که به GND متصل شود موتور در جهت پاد ساعتگرد خواهد چرخید .
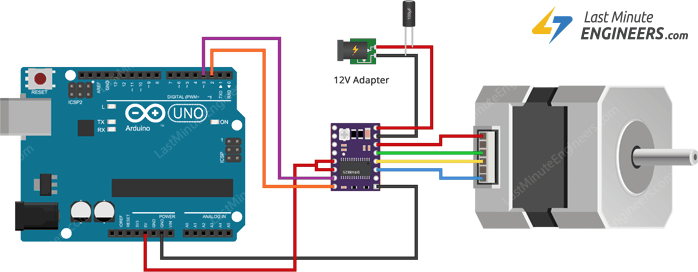
راه اندازی LV8729 با استفاده از آردوینو :
در این مثال یک استپر موتور با استفاده از ماژول LV8729 و با کمک آردوینو راه اندازی می شود ، به این صورت که مقدار سرعت و جهت را در تابع step وارد کرده و سپس با اجرای برنامه ، استپ موتور در جهت و با سرعت وارد شده شروع به چرخش می کند . کنترل دور موتور از طریق پالس PWM وارده به پین Step ماژول و نیز جهت گردش با سیگنال وارده به پین DIR کنترل می گردد .
#include <AccelStepper.h>
// Define pin connections
const int dirPin = 2;
const int stepPin = 3;
// Define motor interface type
#define motorInterfaceType 1
// Creates an instance
AccelStepper myStepper(motorInterfaceType, stepPin, dirPin);
void setup() {
// set the maximum speed, acceleration factor,
// initial speed and the target position
myStepper.setMaxSpeed(1000);
myStepper.setAcceleration(50);
myStepper.setSpeed(200);
myStepper.moveTo(200);
}
void loop() {
// Change direction once the motor reaches target position
if (myStepper.distanceToGo() == 0)
myStepper.moveTo(-myStepper.currentPosition());
// Move the motor one step
myStepper.run();
}