
ماژول GY-87 یک برد سه سنسور می باشد که شامل MPU6050 ، BMP180 و HMC5883 است . وجود سه سنسور در یک برد کوچک می تواند کاربرد های زیادی داشته باشد . سه سنسور قرار گرفته بر روی این ماژول دارای رابط I2C هستند لذا هر سه سنسور را می توان از طریق دو پین SDA و SCL کنترل نمود .این برد قابلیت اندازه گیری شتاب ، زاویه ژیرو و شدت میدان مغناطیسی در سه جهت را دارد . همچنین با وجود سنسور BMP180 قابلیت اندازه گیری فشار و دما را نیز دارد که به راحتی با الگو های ساده ای می توانید از طریق فشار هوای به دست آمده ارتفاع را بدست آورید .
GY-87 بسیار کوچک و کم وزن می باشد لذا می توان از آن در انواع ربات های پرنده استفاده کرد .
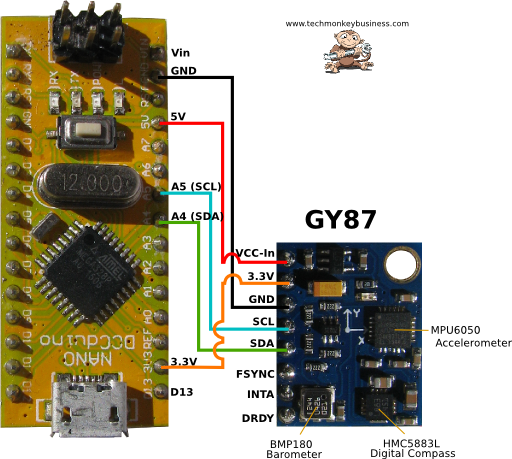
شماتیک اتصال ماژول به آردوینو :
کد های راه اندازی با آردوینو :
برای کامپایل شدن کد های زیر باید کتابخانه های HMC5883 ، MPU6050 و BMP180 را به برنامه اضافه کنید .
#include "I2Cdev.h"
#include "MPU6050.h"
#include "Wire.h"
#include <BMP180.h> //Library for the BMP180 barometer.
//MPU6050 Accelerometer
MPU6050 accelgyro;
int16_t ax, ay, az;
int16_t gx, gy, gz;
//HMC5883L Digital Compass
const int hmc5883Address = 0x1E; //0011110b, I2C 7bit address for compass
const byte hmc5883ModeRegister = 0x02;
const byte hmcContinuousMode = 0x00;
const byte hmcDataOutputXMSBAddress = 0x03;
//The BMP180 Digital Barometer
BMP180 barometer;
// Store the current sea level pressure at your location in Pascals.
float seaLevelPressure = 101325;
int LEDPin = 13;
bool blinkState = false;
int x,y,z; //triple axis data from HMC5883L.
void setup() {
Wire.begin();
Serial.begin(9600);
// initialize device
Serial.println("Initializing I2C devices...");
accelgyro.initialize();
// verify connection
Serial.println("Testing device connections...");
Serial.println(accelgyro.testConnection() ? "MPU6050 connection successful" : "MPU6050 connection failed");
accelgyro.setI2CBypassEnabled(true); //This sets the bypass so the HMC5883L gets a look in.
//Initialise the Digital Compass
Wire.beginTransmission(hmc5883Address); //Begin communication with compass
Wire.write(hmc5883ModeRegister); //select the mode register
Wire.write(hmcContinuousMode); //continuous measurement mode
Wire.endTransmission();
//Initialise the BMP180 Barometer (and Temperature Sensor)
barometer = BMP180();
// We check to see if we can connect to the BMP180 sensor.
if(barometer.EnsureConnected())
{
Serial.println("Connected to BMP180.");
// When we have connected, we reset the device to ensure a clean start.
barometer.SoftReset();
// Now we initialize the sensor and pull the calibration data.
barometer.Initialize();
}
else
{
Serial.println("No BMP180 sensor found.");
}
// configure Arduino LED for
pinMode(LEDPin, OUTPUT);
delay(10000);
}
void loop() {
// read raw accel/gyro measurements from device
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
// these methods (and a few others) are also available
//accelgyro.getAcceleration(&ax, &ay, &az);
//accelgyro.getRotation(&gx, &gy, &gz);
// display tab-separated accel/gyro x/y/z values
Serial.print("a/g:\t");
Serial.print(ax); Serial.print("\t");
Serial.print(ay); Serial.print("\t");
Serial.print(az); Serial.print("\t");
Serial.print(gx); Serial.print("\t");
Serial.print(gy); Serial.print("\t");
Serial.print(gz); Serial.print("\t");
// blink LED to indicate activity
blinkState = !blinkState;
digitalWrite(LEDPin, blinkState);
//Accessing the HMC5883L Digital Compass
//Tell the HMC5883L where to begin reading the data
Wire.beginTransmission(hmc5883Address);
Wire.write(hmcDataOutputXMSBAddress); //Select register 3, X MSB register
Wire.endTransmission();
//Read data from each axis of the Digital Compass
Wire.requestFrom(hmc5883Address,6);
if(6<=Wire.available())
{
x = Wire.read()<<8; //X msb
x |= Wire.read(); //X lsb
z = Wire.read()<<8; //Z msb
z |= Wire.read(); //Z lsb
y = Wire.read()<<8; //Y msb
y |= Wire.read(); //Y lsb
}
int angle = atan2(-y,x)/M_PI*180;
if (angle < 0)
{
angle = angle + 360;
}
//Reporting the Compass data to the Serial port
//Serial.print("Compass XYZ:\t");
//Serial.print(x,y,z);Serial.print("\t");
Serial.print("Dir(deg):\t");
Serial.print(angle); Serial.print("\t");
if(barometer.IsConnected)
{
long currentPressure = barometer.GetPressure();
// Print out the Pressure.
Serial.print("BMP180 P:\t");
Serial.print(currentPressure);Serial.print("Pa");Serial.print("\t");
// Retrieve the current altitude (in meters). Current Sea Level Pressure is required for this.
float altitude = barometer.GetAltitude(seaLevelPressure);
// Print out the Altitude.
Serial.print("Alt:\t");
Serial.print(altitude);Serial.print(" m");Serial.print("\t");
// Retrieve the current temperature in degrees celcius.
float currentTemperature = barometer.GetTemperature();
// Print out the Temperature
Serial.print("Temp:\t");
Serial.print(currentTemperature);Serial.println("C");
}
}