ماژول ها و سنسور های متنوعی جهت اندازه گیری فاصله وجود دارند که از تکنولوژی های مختلفی برای بدست آوردن فاصله استفاده می کنند . یکی از رایج ترین ماژول های اندازه گیری فاصله مدل های SRF04/05 هستند . این ماژول ها از سیگنال های التراسونیک برا اندازه گیری فاصله استفاده میکنند . مدل های IR شرکت Sharp نیز از سیگنال های IR جهت اندازه گیری فاصله استفاده می کنند که معمولا فاصله های زیر 2 متر را اندازه میگیرند . اما مدل هایی وجود دارند که بر پایه لیزر می باشند . در این مدل ها از ارسال یک باریکه نور و دریافت باز تاب آن از اجسام ، فاصله تا مانع به دست می آید . TOF10120 یک ماژول اندازه گیری فاصله لیزری است . این ماژول علاوه بر عملکرد بالایی که نسبت به ماژول های التراسونیک داراد ، حجم بسیار کوچکی دارد . همچنین دقت بالایی داشته و بسیار سریع می باشد . TOF10120 دارای رایط ارتباطی UART می باشد که به راحتی می توانید آن را توسط میکروکنترلر های مختلف راه اندازی کنید .
در تصویر زیر پین های ماژول نشان داده شده است :
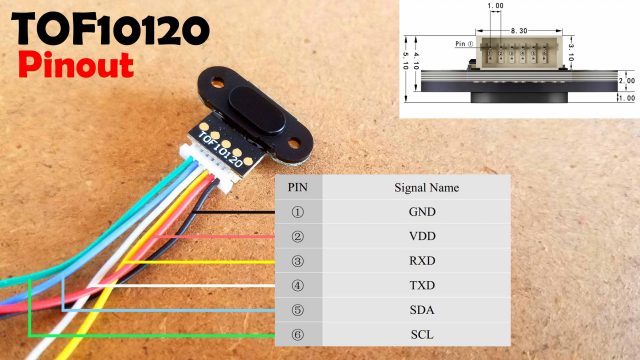
علاوه بر ارتباط UART ، می توان از طریق I2C نیز این ماژول را راه اندازی نمود . TOF10120 قابلیت اندازه گیری فاصله از 10mm تا 1800mm را دارد .
کد های راه اندازی توسط آردوینو :
#include <Wire.h>
unsigned char ok_flag;
unsigned char fail_flag;
unsigned short lenth_val = 0;
unsigned char i2c_rx_buf[16];
unsigned char dirsend_flag=0;
void setup() {
Wire.begin();
Serial.begin(9600,SERIAL_8N1);
printf_begin();
}
void loop() {
int x=ReadDistance();
Serial.print(x);
Serial.println(" mm");
}
int serial_putc( char c, struct __file * )
{
Serial.write( c );
return c;
}
void printf_begin(void)
{
fdevopen( &serial_putc, 0 );
}
void SensorRead(unsigned char addr,unsigned char* datbuf,unsigned char cnt)
{
unsigned short result=0;
// step 1: instruct sensor to read echoes
Wire.beginTransmission(82); // transmit to device #82 (0x52)
// the address specified in the datasheet is 164 (0xa4)
// but i2c adressing uses the high 7 bits so it's 82
Wire.write(byte(addr)); // sets distance data address (addr)
Wire.endTransmission(); // stop transmitting
// step 2: wait for readings to happen
delay(1); // datasheet suggests at least 30uS
// step 3: request reading from sensor
Wire.requestFrom(82, cnt); // request cnt bytes from slave device #82 (0x52)
// step 5: receive reading from sensor
if (cnt <= Wire.available()) { // if two bytes were received
*datbuf++ = Wire.read(); // receive high byte (overwrites previous reading)
*datbuf++ = Wire.read(); // receive low byte as lower 8 bits
}
}
int ReadDistance(){
SensorRead(0x00,i2c_rx_buf,2);
lenth_val=i2c_rx_buf[0];
lenth_val=lenth_val<<8;
lenth_val|=i2c_rx_buf[1];
delay(300);
return lenth_val;
}
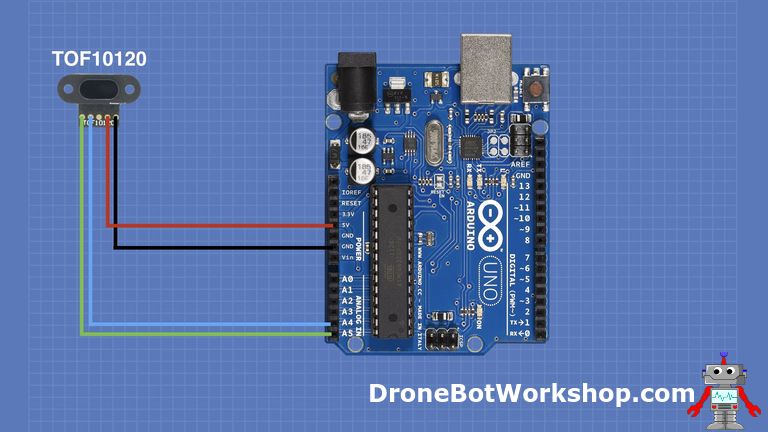
شماتیک اتصال ماژول به آردوینو :