
در ارتباط MCU های با سطح ولتاژ منطقی 5 ولت با سنسور ها و چیپ های با تغذیه پایین تر از 5 ولت ، باید از کانورترهای سطح ولتاژ استفاده کرد . در بسیاری از سنسور های ULP ولتاژ تغذیه حتی پایین تر از 3.3 ولت است به طور مثال ممکن است ولتاژ کاری 1.2 ولت باشد . در چنین شرایطی استفاده از تقسیم مقاومتی کار مناسبی به نظر نمی رشد چرا که وجود مقاومت باعث تلف انرژی خواهد و این موضوع در ندارات پرتابل و ULP از اهمیت بالایی برخوردار است . چیپ PCA9306 یک کانورتر ارتباط های I2C با سطح 1.2 ولت به 5 ولت ارتباط I2C می باشد . در واقع این ماژول امکان ارتباط یک MCU با ولتاژ خروجی حداکثر 5 ولت را با سنسور هایی با ولتاژ حداقل 1.2 ولت فراهم می سازد .
در تصویر زیر پین های این مازول نشان داده شد است :
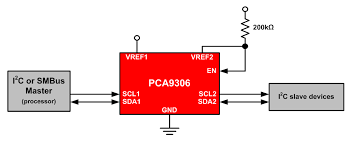
پین های SCL1 و SDA1 به MCU با ولتاژ بالاتر متصل می شود .
پین های SCL2 و SDA2 نیز به چیپ با ولتاژ پایین تر متصل میشود .
همچنین پین های VREF1 و VREF2 برای ولتاژ مرجع هر کدام از طرفین ارتباط می باشد . این پین ها را باید به تغذیه MCU و زرف دوم ارتباط متصل نمود .
راه اندازی ماژول PCA9306 با آردوینو :
در مثال زیر برای راه اندازی ماژول HMC5883L از ماژول PCA9306 استفاده شده است . نحوه اتصال ماژول در تصویر زیر نشان داده شده است .

#include <Arduino.h>
#include "HMC5883L.h"
HMC5883L::HMC5883L()
{
m_Scale = 1;
}
MagnetometerRaw HMC5883L::ReadRawAxis()
{
uint8_t* buffer = Read(DataRegisterBegin, 6);
MagnetometerRaw raw = MagnetometerRaw();
raw.XAxis = (buffer[0] << 8) | buffer[1];
raw.ZAxis = (buffer[2] << 8) | buffer[3];
raw.YAxis = (buffer[4] << 8) | buffer[5];
return raw;
}
MagnetometerScaled HMC5883L::ReadScaledAxis()
{
MagnetometerRaw raw = ReadRawAxis();
MagnetometerScaled scaled = MagnetometerScaled();
scaled.XAxis = raw.XAxis * m_Scale;
scaled.ZAxis = raw.ZAxis * m_Scale;
scaled.YAxis = raw.YAxis * m_Scale;
return scaled;
}
int HMC5883L::SetScale(float gauss)
{
uint8_t regValue = 0x00;
if(gauss == 0.88)
{
regValue = 0x00;
m_Scale = 0.73;
}
else if(gauss == 1.3)
{
regValue = 0x01;
m_Scale = 0.92;
}
else if(gauss == 1.9)
{
regValue = 0x02;
m_Scale = 1.22;
}
else if(gauss == 2.5)
{
regValue = 0x03;
m_Scale = 1.52;
}
else if(gauss == 4.0)
{
regValue = 0x04;
m_Scale = 2.27;
}
else if(gauss == 4.7)
{
regValue = 0x05;
m_Scale = 2.56;
}
else if(gauss == 5.6)
{
regValue = 0x06;
m_Scale = 3.03;
}
else if(gauss == 8.1)
{
regValue = 0x07;
m_Scale = 4.35;
}
else
return ErrorCode_1_Num;
// Setting is in the top 3 bits of the register.
regValue = regValue << 5;
Write(ConfigurationRegisterB, regValue);
}
int HMC5883L::SetMeasurementMode(uint8_t mode)
{
Write(ModeRegister, mode);
}
void HMC5883L::Write(int address, int data)
{
Wire.beginTransmission(HMC5883L_Address);
Wire.write(address);
Wire.write(data);
Wire.endTransmission();
}
uint8_t* HMC5883L::Read(int address, int length)
{
Wire.beginTransmission(HMC5883L_Address);
Wire.write(address);
Wire.endTransmission();
Wire.beginTransmission(HMC5883L_Address);
Wire.requestFrom(HMC5883L_Address, length);
uint8_t buffer[length];
if(Wire.available() == length)
{
for(uint8_t i = 0; i < length; i++)
{
buffer[i] = Wire.read();
}
}
Wire.endTransmission();
return buffer;
}
char* HMC5883L::GetErrorText(int errorCode)
{
if(ErrorCode_1_Num == 1)
return ErrorCode_1;
return "Error not defined.";
}