
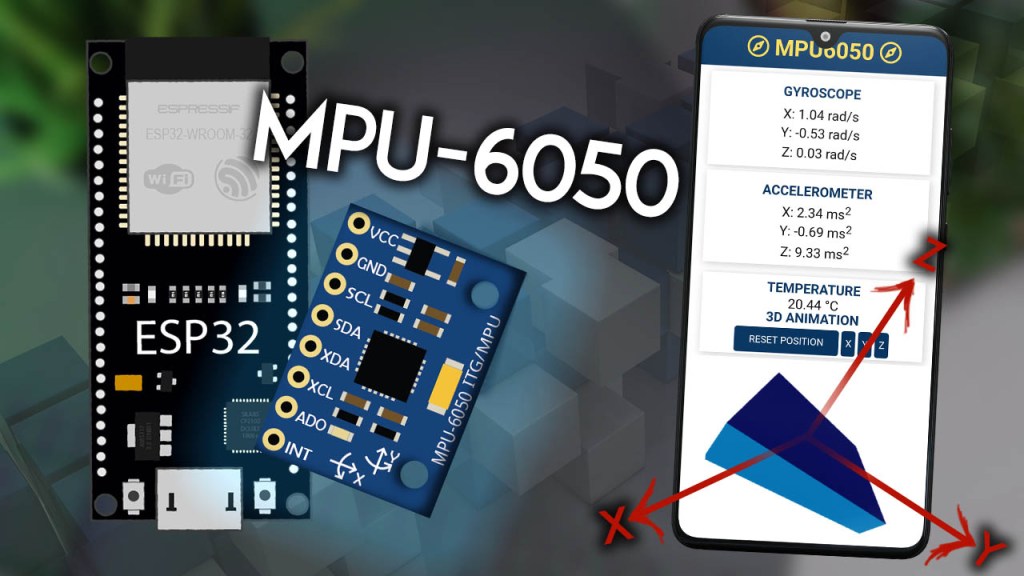
در این پروژه مقادیر شتاب و زاویه ژایرو را با استفاده از یک ماژول MPU6050 و یک برد ESP32 از طریق وب سرور نمایش خواهیم داد . می توانید از هر برد مبتنی بر ESP32 در این پروژه استفاده کنید . بهتر است از برد هایی مانند TTGO T Call که قابلیت اتصال باتری دارند استفاده کنید تا آزادی بیشتری در حرکت دادن برد داشته باشد .
عملکرد برنامه به صورت کلی :
کلیه استایل و اسکریپت و کد های HTML از طریق SPIFFS بر روی ماژول آپلود می شود . قابلیت SPIFFS را در آموزش های قبلی شرح دادیم . تحلیل کد های HTML، CSS و JS خارج از بحث این آموزش است و تنها آگاهی از کلیات آن مهم است . دراین برنامه از کتابخانه Three.js جاوا اسکریپت استفاده شده است . این کتابخانه جهت رسم شکل های سه بعدی می باشد . حتی بازی های گرافیکی و سه بعدی تحت وب را با استفاده از این کتابخانه می توان پیاده کرد اما در این پروژه ما تنها به رسم یک مکعب نیاز خواهیم داشت . مقادیر مربوط به ابعاد مکعب ثابت می باشند و تنها مقادیر مربوط به زاویه و موقعیت آن باید در حین برنامه بر اساس موقعیت و زاویه ماژول MPU6050 تغییر کنند . در برنامه ها و پروژه های قبلی که آموزش داده شده کلیه مقادیری که به صورت وب سرور و از طریق ماژوب های ESP8266 و ESP32 نمایش داده سدن به صورت لحظه ای نبودند و با هر بار رفرش صفحه مقادیر تغییر می کردند . اما در اینجا ما باید مقادیر را به صورت Real Time به سمت Client ارسال کنیم . به همین دلیل از کتابخانه وب سرور آسنکرئم استفاده خواهیم کرد .
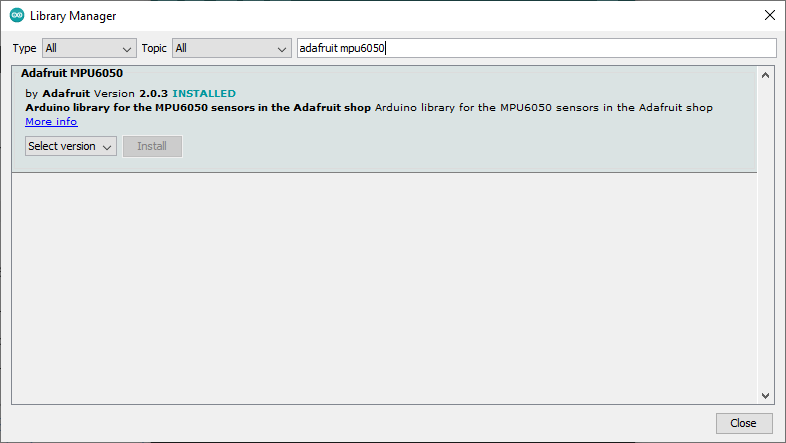
ابتدا کتابخانه های نشان داده شده در تصاویر زیر را دانلود کنید :
1- کتابخانه AdafruitMPU6050 برای راه اندازی ماژول MPU6050 :
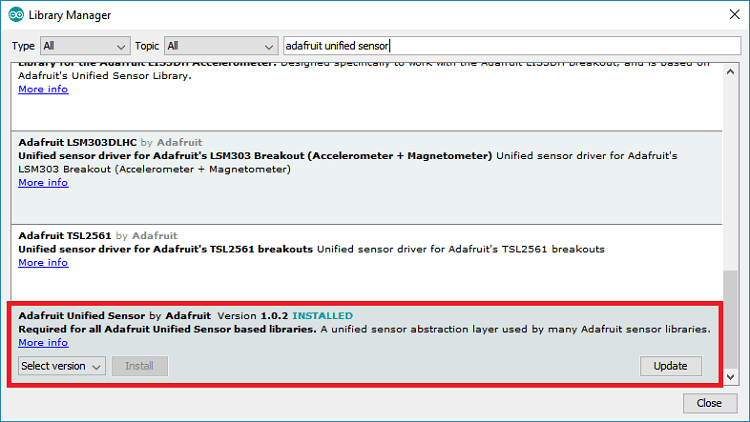
2- کتابخانه Adafruit Unified Sensor برای استاندارد سازی پارامتر های دریافتی از سنسور ها :
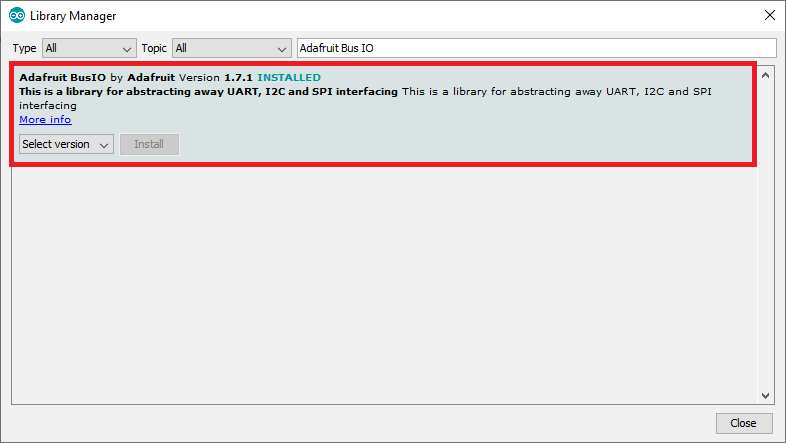
3- نصب کتابخانه Adafruit_BusIO . این کتابخانه برای راه اندازی سنسور ها و ماژول های با رابط I2C و SPI می باشد :
4- کتابخانه های زیر را باید جدا دانلود کرده و آن ها را نصب کنید :
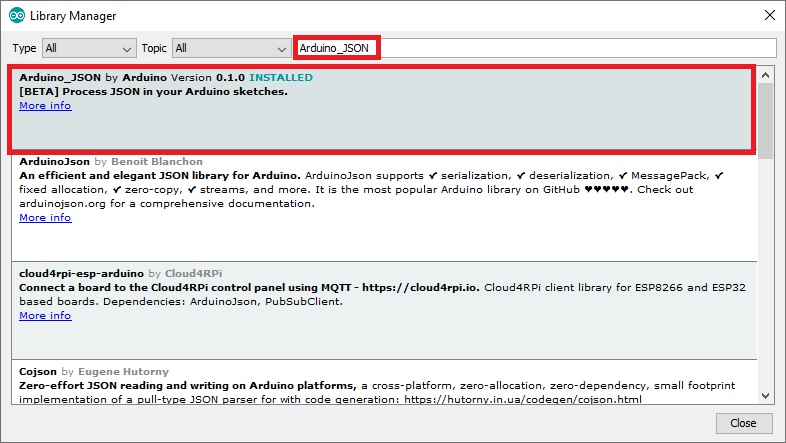
5- برای مرتب بودن ساختار داده های ارسالی از json استفاده شده است . لذا باید کتابخانه json را دانلود کنید :
پس از نصب کتابخانه های کد های زیر را بر روی برد خود پروگرام کنید :
#include <Arduino.h>
#include <WiFi.h>
#include <AsyncTCP.h>
#include <ESPAsyncWebServer.h>
#include <Adafruit_MPU6050.h>
#include <Adafruit_Sensor.h>
#include <Arduino_JSON.h>
#include "SPIFFS.h"
// Replace with your network credentials
const char* ssid = "در این قسمت نام وایفای خود را وارد کنید ";
const char* password = "در این قمست رمز وایفای خود را وارد کنید ";
// Create AsyncWebServer object on port 80
AsyncWebServer server(80);
// Create an Event Source on /events
AsyncEventSource events("/events");
// Json Variable to Hold Sensor Readings
JSONVar readings;
// Timer variables
unsigned long lastTime = 0;
unsigned long lastTimeTemperature = 0;
unsigned long lastTimeAcc = 0;
unsigned long gyroDelay = 10;
unsigned long temperatureDelay = 1000;
unsigned long accelerometerDelay = 200;
// Create a sensor object
Adafruit_MPU6050 mpu;
sensors_event_t a, g, temp;
float gyroX, gyroY, gyroZ;
float accX, accY, accZ;
float temperature;
//Gyroscope sensor deviation
float gyroXerror = 0.07;
float gyroYerror = 0.03;
float gyroZerror = 0.01;
// Init MPU6050
void initMPU(){
if (!mpu.begin()) {
Serial.println("Failed to find MPU6050 chip");
while (1) {
delay(10);
}
}
Serial.println("MPU6050 Found!");
}
void initSPIFFS() {
if (!SPIFFS.begin()) {
Serial.println("An error has occurred while mounting SPIFFS");
}
Serial.println("SPIFFS mounted successfully");
}
// Initialize WiFi
void initWiFi() {
WiFi.mode(WIFI_STA);
WiFi.begin(ssid, password);
Serial.println("");
Serial.print("Connecting to WiFi...");
while (WiFi.status() != WL_CONNECTED) {
Serial.print(".");
delay(1000);
}
Serial.println("");
Serial.println(WiFi.localIP());
}
String getGyroReadings(){
mpu.getEvent(&a, &g, &temp);
float gyroX_temp = g.gyro.x;
if(abs(gyroX_temp) > gyroXerror) {
gyroX += gyroX_temp/50.00;
}
float gyroY_temp = g.gyro.y;
if(abs(gyroY_temp) > gyroYerror) {
gyroY += gyroY_temp/70.00;
}
float gyroZ_temp = g.gyro.z;
if(abs(gyroZ_temp) > gyroZerror) {
gyroZ += gyroZ_temp/90.00;
}
readings["gyroX"] = String(gyroX);
readings["gyroY"] = String(gyroY);
readings["gyroZ"] = String(gyroZ);
String jsonString = JSON.stringify(readings);
return jsonString;
}
String getAccReadings() {
mpu.getEvent(&a, &g, &temp);
// Get current acceleration values
accX = a.acceleration.x;
accY = a.acceleration.y;
accZ = a.acceleration.z;
readings["accX"] = String(accX);
readings["accY"] = String(accY);
readings["accZ"] = String(accZ);
String accString = JSON.stringify (readings);
return accString;
}
String getTemperature(){
mpu.getEvent(&a, &g, &temp);
temperature = temp.temperature;
return String(temperature);
}
void setup() {
Serial.begin(115200);
initWiFi();
initSPIFFS();
initMPU();
// Handle Web Server
server.on("/", HTTP_GET, [](AsyncWebServerRequest *request){
request->send(SPIFFS, "/index.html", "text/html");
});
server.serveStatic("/", SPIFFS, "/");
server.on("/reset", HTTP_GET, [](AsyncWebServerRequest *request){
gyroX=0;
gyroY=0;
gyroZ=0;
request->send(200, "text/plain", "OK");
});
server.on("/resetX", HTTP_GET, [](AsyncWebServerRequest *request){
gyroX=0;
request->send(200, "text/plain", "OK");
});
server.on("/resetY", HTTP_GET, [](AsyncWebServerRequest *request){
gyroY=0;
request->send(200, "text/plain", "OK");
});
server.on("/resetZ", HTTP_GET, [](AsyncWebServerRequest *request){
gyroZ=0;
request->send(200, "text/plain", "OK");
});
// Handle Web Server Events
events.onConnect([](AsyncEventSourceClient *client){
if(client->lastId()){
Serial.printf("Client reconnected! Last message ID that it got is: %u\n", client->lastId());
}
// send event with message "hello!", id current millis
// and set reconnect delay to 1 second
client->send("hello!", NULL, millis(), 10000);
});
server.addHandler(&events);
server.begin();
}
void loop() {
if ((millis() - lastTime) > gyroDelay) {
// Send Events to the Web Server with the Sensor Readings
events.send(getGyroReadings().c_str(),"gyro_readings",millis());
lastTime = millis();
}
if ((millis() - lastTimeAcc) > accelerometerDelay) {
// Send Events to the Web Server with the Sensor Readings
events.send(getAccReadings().c_str(),"accelerometer_readings",millis());
lastTimeAcc = millis();
}
if ((millis() - lastTimeTemperature) > temperatureDelay) {
// Send Events to the Web Server with the Sensor Readings
events.send(getTemperature().c_str(),"temperature_reading",millis());
lastTimeTemperature = millis();
}
}
سپس از لینک زیر یه فایل با فرمت های Html ، CSS و JS را دانلود و آن را از طریق SPIFFS بر روی برد خود پروگرام کنید . قابلیت SPIFFS در آموزش های قبلی شرح داده شد .
https://github.com/RuiSantosdotme/Random-Nerd-Tutorials/tree/master/Projects/ESP32/ESP32_MPU_6050_Web_Server/data
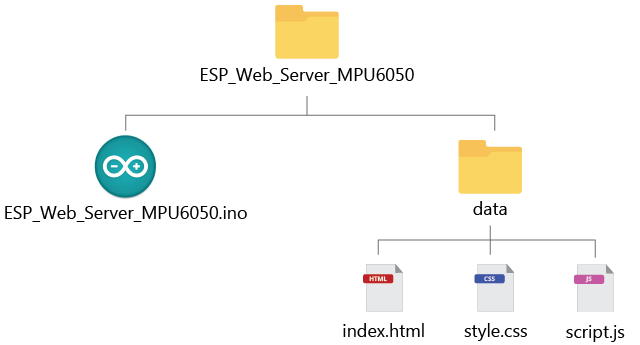
نحوه ذخیره فایل ها در فولدر مربوط به پروژه ( برای استفاده از SPIFFS حتما باید این ترتیب رعایت گردد ) .
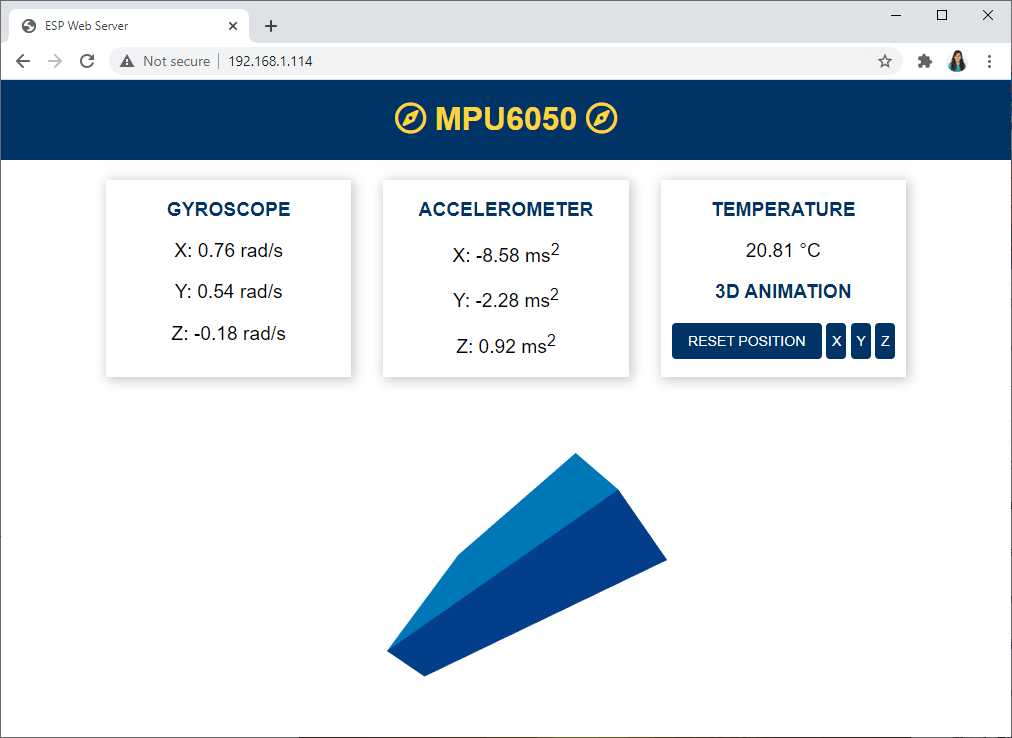
پس پروگرام کردن برنامه و همچنین فایل های فوق بر روی ماژول ، وارد محیط Serial monito آردوینو IDE شوید و یکبار ماژور را ریست کنید . IP را که نشان داده می شود در مروگر خود سرچ کنید تا صفحه زیر باز شود :
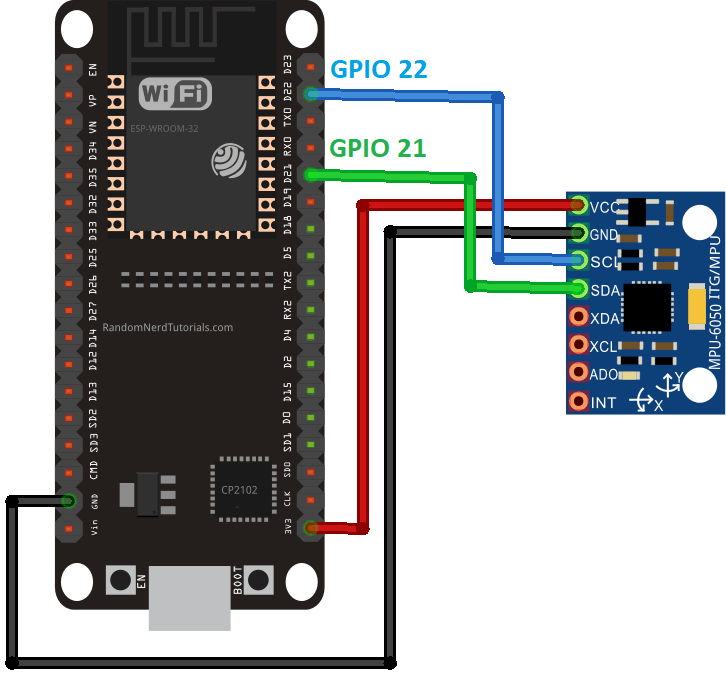
شماتیک اتصال MPU6050 به برد ESP32 :
منبع :https://randomnerdtutorials.com/esp32-mpu-6050-web-server/