
TB6612FNG یک ماژول درایور موتور DC است که قابلیت راه اندازی و کنترل دو موتو را دارد . از این ماژول در ربات های کوچک و همچنین در تجهیزاتی مانند CNC ها می توان استفاده نمود . TB6612FNG تا حداکثر 1.2 آمپر برای هر موتور را می تواند تحمل کند و نیز قابلیت ترمز کوتا و توقف کامل را دارد . در این آموزش قصد داریم به راه اندازی و به کار گیری این ماژول بپردازیم . برای کنترل موتور های متصل به این ماژول باید از سیگنال های با منطق 3.3 تا 5 ولت استفاده کرد . همچنین حداکثر ولتاژ تغذیه برای موتور ها 15 ولت می باشد . برای کنترل دور هر موتور می توان سیگنال های PWMرا بر روی پین های کنترلی ماژول قرار داد . در شکل زیر خروجی های ماژول نشان داده شده اند .
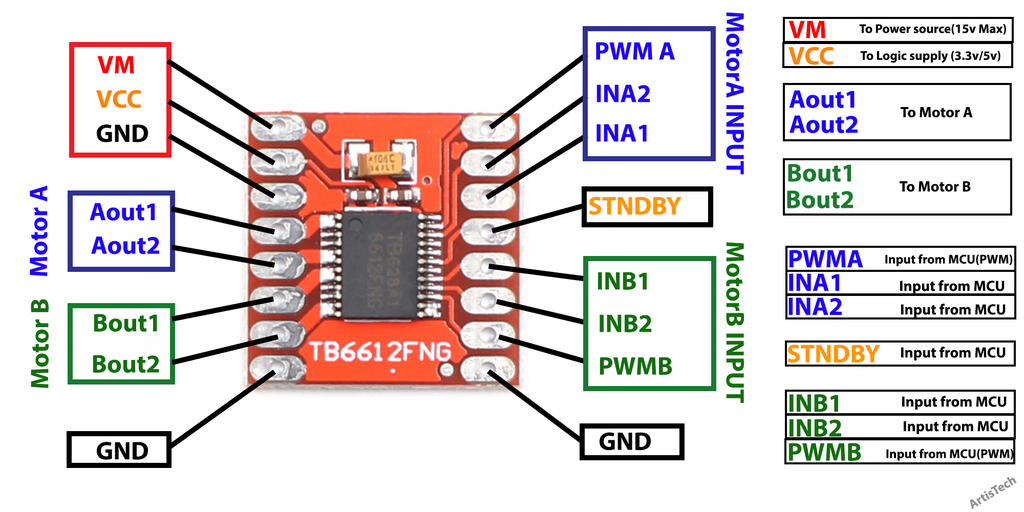
1- VM ولتاژ تغذیه موتور که حداکثر تا 15 ولت می باشد .
2- VCC ولتاژ تغذیه ماژول که 3 تا 5 ولت است .
3- Aout1 و Aout2 خروجی موتور 1 .
4- Bout1 و Bout2 خروجی موتور 2 .
5- GND زمین ماژول .
6- PWM A ورودی سیگنال PWM از MCU
7- INA1 و INA2 جهت کنترل موتور A می باشند که باید به MCU متصل شوند .
8- STNDBY جهت کنترل حالت آماده به کار ماژول که باید به MCU متصل شود .
9- INB و PWMB همانند پین های INA و PWMA می باشند با این تفاوت که برای موتور B هستند .
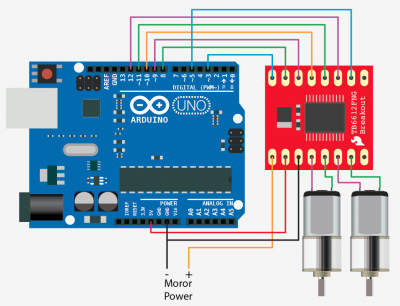
شماتیک اتصال ماژول به آردوینو :
کد های راه اندازی با آردوینو :
//motor A connected between A01 and A02
//motor B connected between B01 and B02
int STBY = 10; //standby
//Motor A
int PWMA = 3; //Speed control
int AIN1 = 9; //Direction
int AIN2 = 8; //Direction
//Motor B
int PWMB = 5; //Speed control
int BIN1 = 11; //Direction
int BIN2 = 12; //Direction
void setup(){
pinMode(STBY, OUTPUT);
pinMode(PWMA, OUTPUT);
pinMode(AIN1, OUTPUT);
pinMode(AIN2, OUTPUT);
pinMode(PWMB, OUTPUT);
pinMode(BIN1, OUTPUT);
pinMode(BIN2, OUTPUT);
}
void loop(){
move(1, 255, 1); //motor 1, full speed, left
move(2, 255, 1); //motor 2, full speed, left
delay(1000); //go for 1 second
stop(); //stop
delay(250); //hold for 250ms until move again
move(1, 128, 0); //motor 1, half speed, right
move(2, 128, 0); //motor 2, half speed, right
delay(1000);
stop();
delay(250);
}
void move(int motor, int speed, int direction){
//Move specific motor at speed and direction
//motor: 0 for B 1 for A
//speed: 0 is off, and 255 is full speed
//direction: 0 clockwise, 1 counter-clockwise
digitalWrite(STBY, HIGH); //disable standby
boolean inPin1 = LOW;
boolean inPin2 = HIGH;
if(direction == 1){
inPin1 = HIGH;
inPin2 = LOW;
}
if(motor == 1){
digitalWrite(AIN1, inPin1);
digitalWrite(AIN2, inPin2);
analogWrite(PWMA, speed);
}else{
digitalWrite(BIN1, inPin1);
digitalWrite(BIN2, inPin2);
analogWrite(PWMB, speed);
}
}
void stop(){
//enable standby
digitalWrite(STBY, LOW);
}