
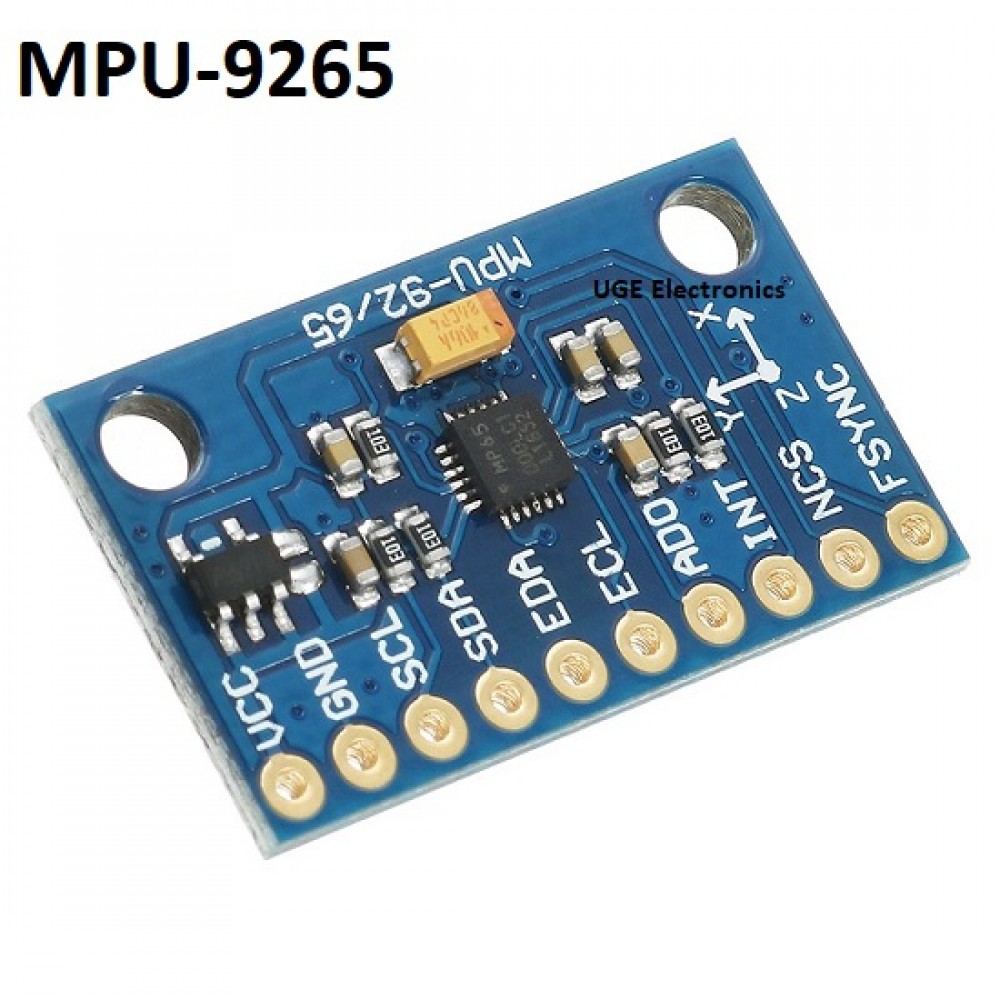
MPU9265 یک سنسور اندازه گیری شتاب و ژیرو یکپارچه است که می تواند مقادیر شتاب و زاویه ژایرو را از طریق یک رابط I2C به MCU بفرستد . MPU9265 دارای یک واحد پردازش سیگنال DMP است که می تواند الگو های پیچده 9 محوره را پردازش کند . این سنسور قابلیت اندازه گیری شتاب با دقت 2g تا 16g را دارد . همچنین مقادیر زاویه ژایرو را با سرعت حداکثر 2000 نمونه در ثانیه دارد . MPU9265 دارای پایداری و دقت بیشتری نسبت به مدل MPU6050 می باشد که می توانید از آن در کاربرد های حساس مانند کوادکوپتر ها استفاده کنید . همجنین این مازول قابلیت اتصال سنسور های مگنتومتر با رابط I2C را دارد . در تصویر زیر پین های این ماژول نشان داده شده است :
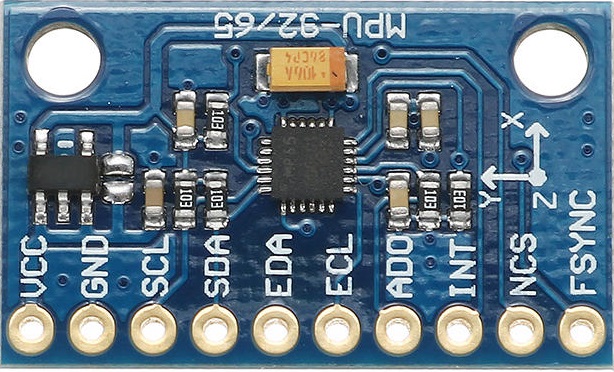
پین های مهم این ماژول به شرح زیر می باشند:
1- VCC و GND پین های تغذیه و زمین ماژول هستند .
2- پین های SDL و SDA پین های ارتباط I2C ماژول می باشند .
3- پین های EDA و ECL همان پین های SDA و SCL ارتباط I2C می باشند که از این دو پین جهت اتصال سنسور های دیگر مانند مگتومتر ها می توان استفاده نمود .
4- INT پین وقفه سنسور می باشد که می توانید شرط وقفه را تعیین کنید .
مشخصات :
- ولتاژ تغذیه 3.3 ولت
- دارای FIFO داخلی
- اندازه گیری شدت میدان مغتاطیسی در 3 محور
- اندازه گیری زاویه ژیرو در سه محور
- رنج ژیرو 250 ، 500 ، 1000 و 2000 درجه بر ثانیه
- اندازه گیری شتاب در سه محور
- رنج اندازه گیری شتاب 2 ، 4 ، 8 و 16 g
- محور اندازه گیری میدان مغناطیسی ±4800Ut
.
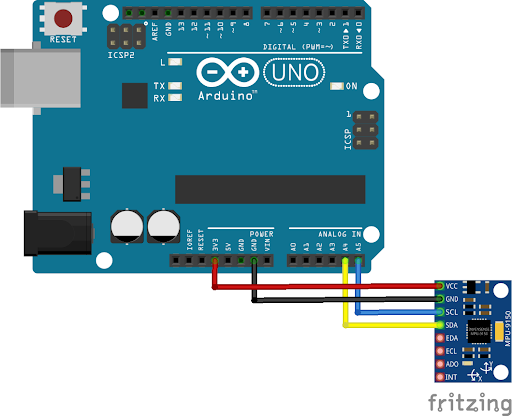
راه اندازی ماژول MPU9265 توسط آردوینو :
#include <Wire.h>
#include <TimerOne.h>
#define MPU9250_ADDRESS 0x68
#define MAG_ADDRESS 0x0C
#define GYRO_FULL_SCALE_250_DPS 0x00
#define GYRO_FULL_SCALE_500_DPS 0x08
#define GYRO_FULL_SCALE_1000_DPS 0x10
#define GYRO_FULL_SCALE_2000_DPS 0x18
#define ACC_FULL_SCALE_2_G 0x00
#define ACC_FULL_SCALE_4_G 0x08
#define ACC_FULL_SCALE_8_G 0x10
#define ACC_FULL_SCALE_16_G 0x18
// This function read Nbytes bytes from I2C device at address Address.
// Put read bytes starting at register Register in the Data array.
void I2Cread(uint8_t Address, uint8_t Register, uint8_t Nbytes, uint8_t* Data)
{
// Set register address
Wire.beginTransmission(Address);
Wire.write(Register);
Wire.endTransmission();
// Read Nbytes
Wire.requestFrom(Address, Nbytes);
uint8_t index=0;
while (Wire.available())
Data[index++]=Wire.read();
}
// Write a byte (Data) in device (Address) at register (Register)
void I2CwriteByte(uint8_t Address, uint8_t Register, uint8_t Data)
{
// Set register address
Wire.beginTransmission(Address);
Wire.write(Register);
Wire.write(Data);
Wire.endTransmission();
}
// Initial time
long int ti;
volatile bool intFlag=false;
// Initializations
void setup()
{
// Arduino initializations
Wire.begin();
Serial.begin(115200);
// Set accelerometers low pass filter at 5Hz
I2CwriteByte(MPU9250_ADDRESS,29,0x06);
// Set gyroscope low pass filter at 5Hz
I2CwriteByte(MPU9250_ADDRESS,26,0x06);
// Configure gyroscope range
I2CwriteByte(MPU9250_ADDRESS,27,GYRO_FULL_SCALE_1000_DPS);
// Configure accelerometers range
I2CwriteByte(MPU9250_ADDRESS,28,ACC_FULL_SCALE_4_G);
// Set by pass mode for the magnetometers
I2CwriteByte(MPU9250_ADDRESS,0x37,0x02);
// Request continuous magnetometer measurements in 16 bits
I2CwriteByte(MAG_ADDRESS,0x0A,0x16);
pinMode(13, OUTPUT);
Timer1.initialize(10000); // initialize timer1, and set a 1/2 second period
Timer1.attachInterrupt(callback); // attaches callback() as a timer overflow interrupt
// Store initial time
ti=millis();
}
// Counter
long int cpt=0;
void callback()
{
intFlag=true;
digitalWrite(13, digitalRead(13) ^ 1);
}
// Main loop, read and display data
void loop()
{
while (!intFlag);
intFlag=false;
// Display time
Serial.print (millis()-ti,DEC);
Serial.print ("\t");
// _______________
// ::: Counter :::
// Display data counter
// Serial.print (cpt++,DEC);
// Serial.print ("\t");
// ____________________________________
// ::: accelerometer and gyroscope :::
// Read accelerometer and gyroscope
uint8_t Buf[14];
I2Cread(MPU9250_ADDRESS,0x3B,14,Buf);
// Create 16 bits values from 8 bits data
// Accelerometer
int16_t ax=-(Buf[0]<<8 | Buf[1]);
int16_t ay=-(Buf[2]<<8 | Buf[3]);
int16_t az=Buf[4]<<8 | Buf[5];
// Gyroscope
int16_t gx=-(Buf[8]<<8 | Buf[9]);
int16_t gy=-(Buf[10]<<8 | Buf[11]);
int16_t gz=Buf[12]<<8 | Buf[13];
// Display values
// Accelerometer
Serial.print (ax,DEC);
Serial.print ("\t");
Serial.print (ay,DEC);
Serial.print ("\t");
Serial.print (az,DEC);
Serial.print ("\t");
// Gyroscope
Serial.print (gx,DEC);
Serial.print ("\t");
Serial.print (gy,DEC);
Serial.print ("\t");
Serial.print (gz,DEC);
Serial.print ("\t");
// _____________________
// ::: Magnetometer :::
// Read register Status 1 and wait for the DRDY: Data Ready
uint8_t ST1;
do
{
I2Cread(MAG_ADDRESS,0x02,1,&ST1);
}
while (!(ST1&0x01));
// Read magnetometer data
uint8_t Mag[7];
I2Cread(MAG_ADDRESS,0x03,7,Mag);
// Create 16 bits values from 8 bits data
// Magnetometer
int16_t mx=-(Mag[3]<<8 | Mag[2]);
int16_t my=-(Mag[1]<<8 | Mag[0]);
int16_t mz=-(Mag[5]<<8 | Mag[4]);
// Magnetometer
Serial.print (mx+200,DEC);
Serial.print ("\t");
Serial.print (my-70,DEC);
Serial.print ("\t");
Serial.print (mz-700,DEC);
Serial.print ("\t");
// End of line
Serial.println("");
}